
알쏭달쏭 공부한거 쓰기
9/27융합전자특강 본문
소형화, 트럭
무인택시
현대차: 자동차 소프트웨어로 인식 >구독서비스
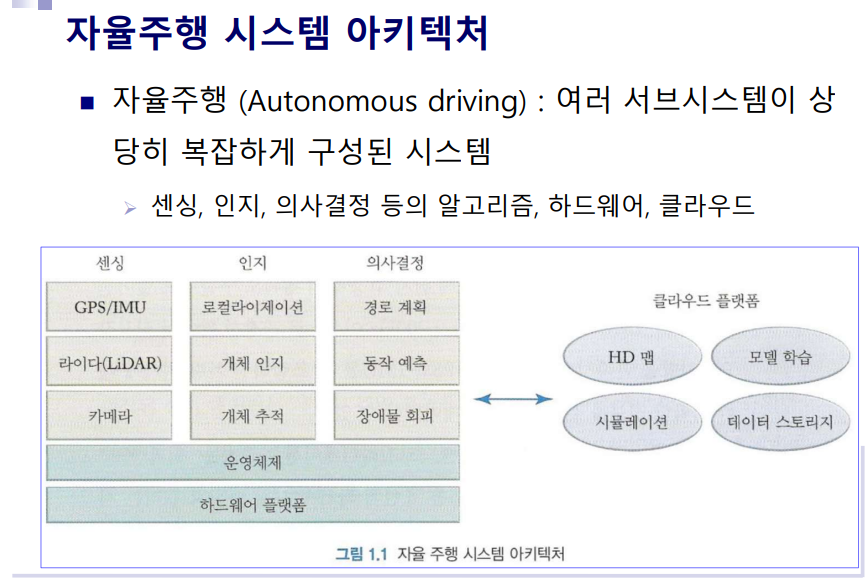
플랫폼(자동차)에 올라가는 sw vs 인터넷(클라우드) 올리는 sw
sw를 분리해서 개발하는게 요즘 trend
크게 2개로 나뉘고 두 개는 통신(V2X)으로 연결된다 .
인지 부분에서 가장중요: 로컬라이제이션-지구에서 나의 위치
로봇공학에서의 자율주행= 제한됨. 건물 내 등 한정된 구역에서 다루는 자율주행
그러나
자율주행 자동차=차의 특성상 범위가 확장됨.
동작예측이 어려워 자율주행차 속도제한 있음.
GPS: cm 급으로 위치 측정이 어려움 m단위로 오차가 발생함.
오차를 줄이기 위해 지도위해 차 측정
1)HP지도 -정밀 증가할수록 데이터가 증가로 메모리 증가> 메모리 용량이 상관없는 클라우드 서브인터넷에서 이용함
2)시뮬레이션 프로그램으로 테스트
3)모델 학습-GPU고사양이 필요함.
4)많은 영상 데이터를 클라우드에 저장하는 데이터 스토리지를 이용
라이더-고정, 이동 물체 확인
-고정 장애물: 정밀지도에서 비교해서 위치 오차를 뽑을 수 있음.
감지한 장애물과 정밀지도의 장애물을 비교해서 오차를 뽑을 수 있음(GPS)
위성으로 위치를 감지하면 1m안으로 오차를 주기가 쉽지 않음.
도로에서 자율주행을 위해 10cm안으로 오차를 한정하기 위해서는 정밀지도와 고정 장애물을 써야함.
좁은 영역에서는 RTK라는 기술을 이용해 cm까지 줄일 수 있지만 넓은 영역에서는 어려움.
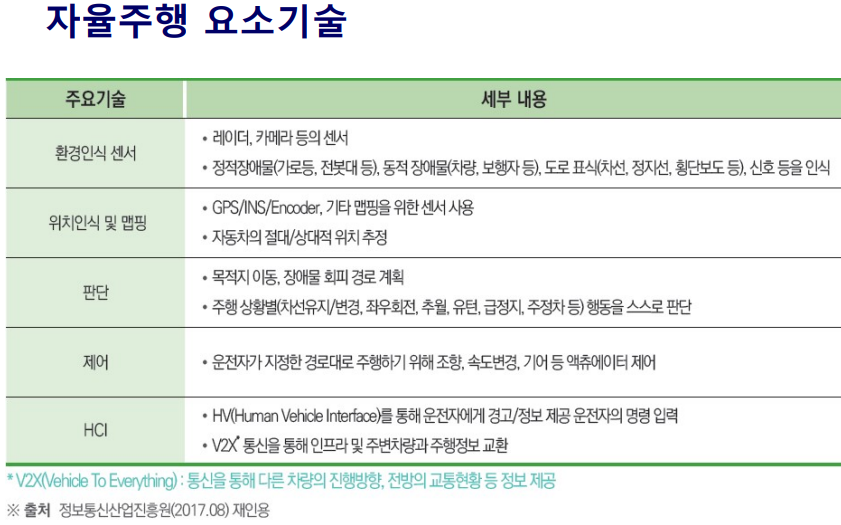
판단 알고리즘
-단순하게 만들어서 사고시 원인을 쉽게 찾으려고함.
제어
차량 동력학 기반으로 했지만 지금은 인공지능을 이용해서 제어모듈을 사용함.
차가 바뀌어도 모델을 바꾸지않고 제어할 수 있음.
HCI
(마우스)인간과 컴퓨터의 interaction
V2X로 인프라와 정보 교환
훗날 차량과, 사람간의 정보교환으로 확대될것을 기대함.
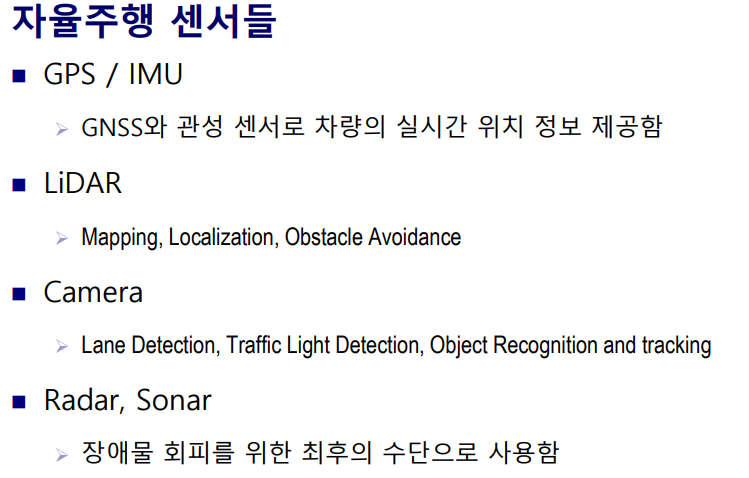
1.GPS
일반적 GPS 10m이내, 실내x
위성으로 위치를 잡아주는 시스템=GNSS(글로벌 네비게이션 ss)
GNSS의 미국판 버전이 GPS임.
GPS성능을 높이기 위해 다른 나라의 위성정보도 올릴 수 있음.
GPS의 성능을 높인 DGPS를 자율주행에서 이용함(1m오차)
(저속으로 자율주행시 25cm정도)
속독 빠르면 오차를 줄여야함. 0.1,0.05m까지 줄여야함
위성에서 오는 정보를 주무으로 저가는 1초 고가는 100ms 주기로 정보를 줌.
보통 중저가를 사용하는데 DGPS 1초에 4-5번 정보를 줌
10ms마다 정보를 주어야함,
센서를 GPS, IMU 항상 같이 붙여서 이용해야함.
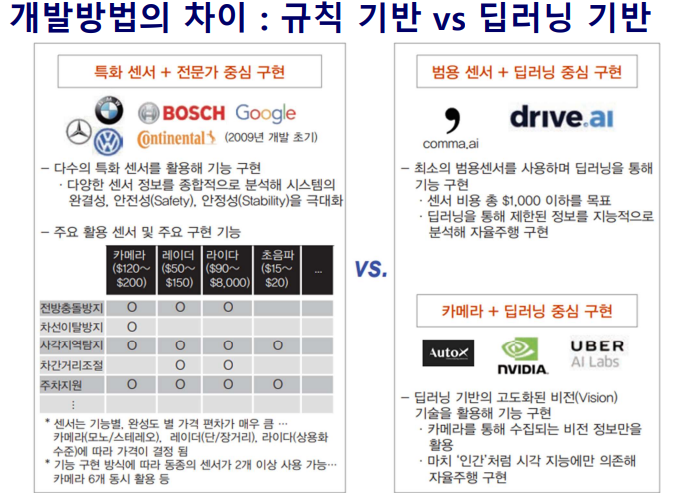
2.LiDAR cm까지 정확도가 좋음 -물체정보 파악
-차의 위치 측정
-기존 맵, 내가 만든 맵으로 오차 확인.
-장해물 회피를 위해 라이더를 이용함.
3.카메라
-사람눈으로 보는 정보를 읽어옴
-차선, 신호등.. etc
-ai로 구현
4.Radar, Sonar
-안개 낀 상황에서 라이더, 카메라 작동을 안함.
-전파인 Radar를 이용해 최종적인 장애물을 회피함
-근거리용으로 초음파 센서 이용
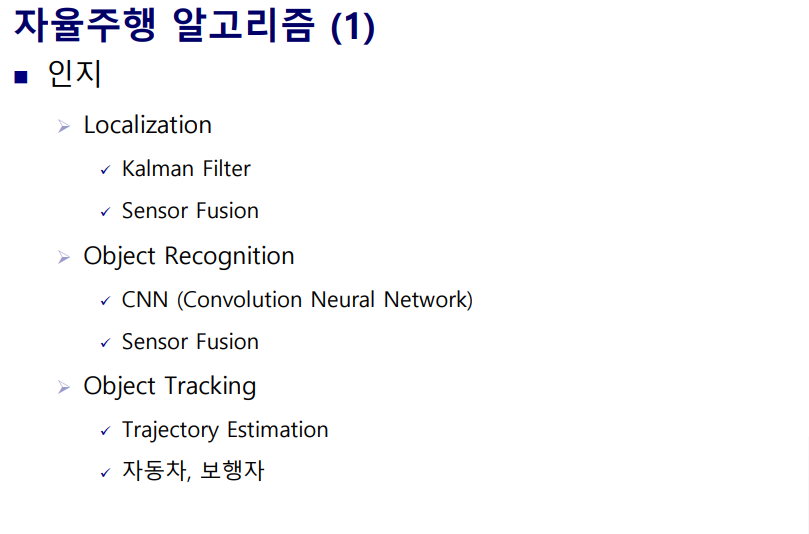
1개의 센서로는 로컬리제이션 하기 어려움.
1m오차로 읽는 것도 어려움
각 센서가 가지는 노이즈를 필터링하기 위해 Kalman Filter를 이용함.
칼만 필터를 가지고 로컬리제이션 함.
CNN/RNN을 이용해서 물체 인지가 쉬워짐.
영상을 가지고 물체를 감지하기 때문에 인공지능을 이용해 코딩 작성하기가 쉬워짐.
카메라로 물체 인지가 거의 99%인지 되는 듯
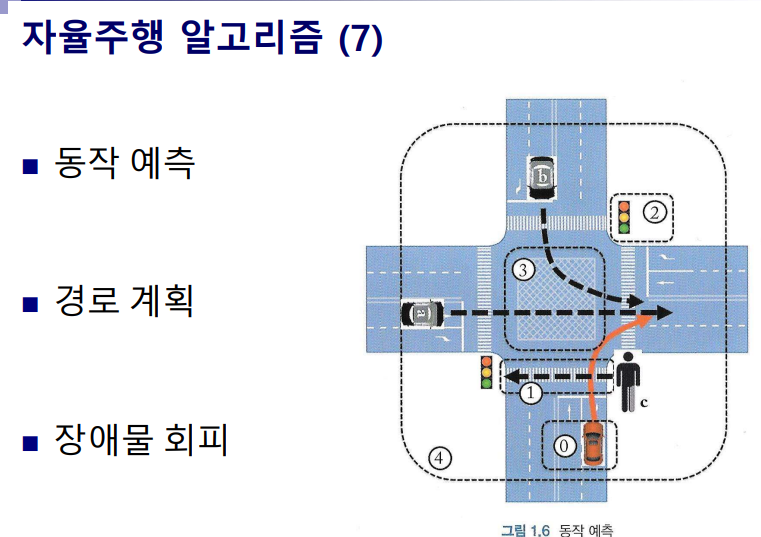
물체를 tracking하는 법-자율주행에서 어려운 문제점
물체가 어느방향으로 어느속도로 움직이는지가 어려움. (예측이 어려움)
-물체의 좌표를 찍기는데 물체가 멀어지면 좌표가 흔들림.
좌표를 자동차 , 보행자를 트랙킹 >좋은 알고리즘+좋은 컴을 자율주행차에 하기는 어려움.
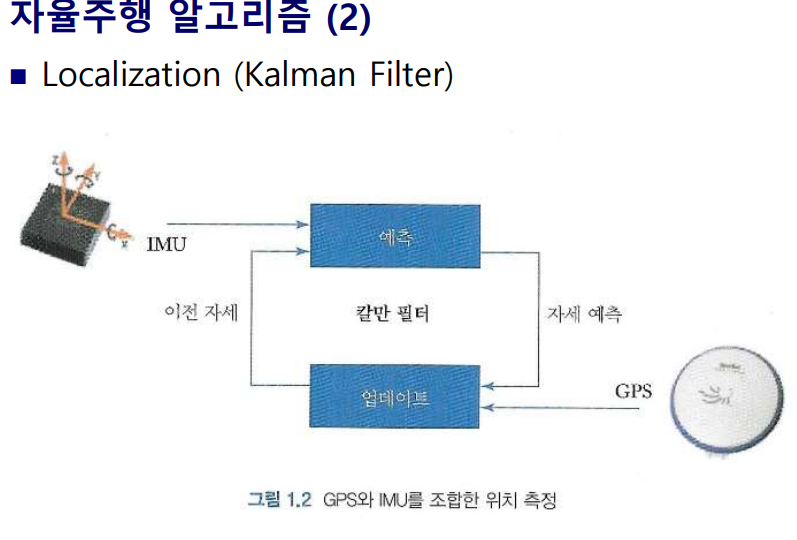
루프로 동작.
GPS로 들어오는 정보=현재 나의 위치는 2-20m오차로 들어옴.
동그라미 형태로 여러 spot 정보를 얻음=노이즈라고 함.
x,y,z축으로 얼만큼 회전했는지 가속정보을 알 수있음 총6가지 정보를 뽑음으로 6축센서라고 불림.
>자이로스콥프
9축센서=자기장 기준으로 xyz성분을 포함함.(잘 안쓰는 것 같음)
철이 많은 구조물이 있으면 축이 돌아감.
GPS-1HZ정도
IMU가 돌면서 좌표를 만들다가 GPS준 정보로 업데이트함. 노이즈가 있는 환경에서 칼만 필터로
노이즈 제거함 (low pass filter 형태로 고주파 성능을 제거함)
>차의 평균값에 가깝게 잡아주도록함
IMU가 주는 방향값, 등 IMU에도 노이즈가 존재함.
영정 자체가 온도가 변하면 기준값이 변함으로 업데이트가 늦어지면 오차가 누적됨. >오차가 굉장히 커짐.
보통 IMU로만 예측을 하는게 아니라 차량의 동력학 모델을 같이 넣어서 예측을 진행함.
차랑 모델링(모델 수식)을 이용해서 좌표가 오차가 커지지 않도록 함.
예측하는 기능으로 GPS가 연속적으로 들어오지 않아도 좌표를 만들 수 있도록함.
IMU센서가 들어오면서 예측값을 만들 수 있으므로 차가 원하는 형태로 제어를 빠르게 할 수 있음.
5ms?
칼만 필터 알고리즘- 데이터의 주파수 정도 10ms 한번
1ms마다 imu
10ms GPS로 업데이트>노이즈 제거 >통신이나 메세지로 내보냄
외부에서 좌표값을 읽어서 활용할 수 있게함.
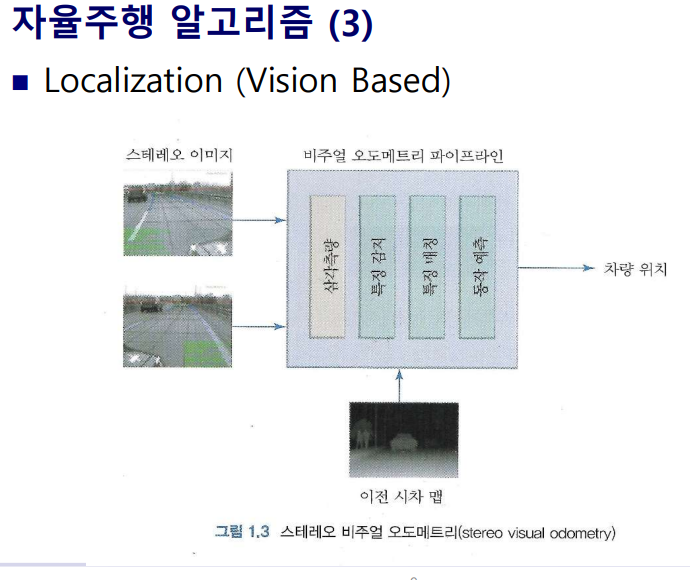
카메라 센서로 로컬제이션
그 중 한개- 스테레오 비주얼 오도메트리
실내 주행-비전베이스로 로컬리제이션함.
움직여도 고정된 특징점을 겹쳐서 트랙킹 시킴으로서 얼만큼 움직였는지 알 수 있게함.
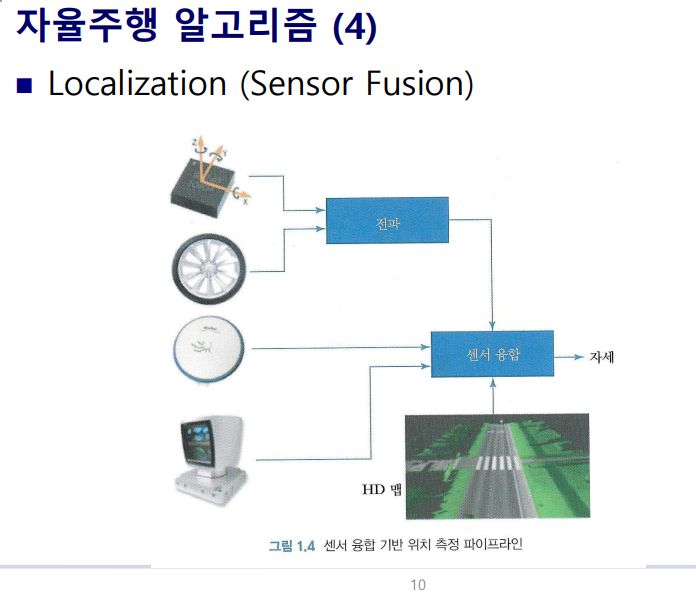
IMU sensor
바퀴-차량 모델링/속도 센서
+
GPS
//1m오차 아직 어려움
+
라이더를 이용해 데이터를 모아서 지도를 만듦 .
정밀지도와 만든 지도를 비교해서 오차를 줄임(디프렌셜)
//10cm오차를 만들 수 있음
개체인지는 최근에 YOLO v3를 이용함. (쉬움)
>object Tracking이 어려움.
사람이 한명 겹치면 트랙킹이 연결이 안됨. >이거 융기특에서 etri 연구원님이 소개했던거 같은데?
의사 결정방법
2가지 방식이 있음.
2가지를 혼합해서 사용함.
'3-2학기 > 융합전자특강' 카테고리의 다른 글
| 10월 18일 융합전자특강. 6주차 (2) | 2024.10.18 |
|---|---|
| 10/11일 융합전자 특강 (2) | 2024.10.11 |
| 융합전자특강 2024-9-13 (2) | 2024.09.13 |

